
盖世汽车讯 传统机器人,例如用于工业和危险环境的机器人,易于建模和控制,但过于僵硬,无法在狭窄空间和不平坦地形中操作。柔软的仿生机器人则更善于适应环境,并在其他难以触及的地方进行操控。然而,这些更灵活的功能通常需要一系列机载传感器和针对每个机器人设计量身定制的空间模型。
图片来源: 期刊《Nature》
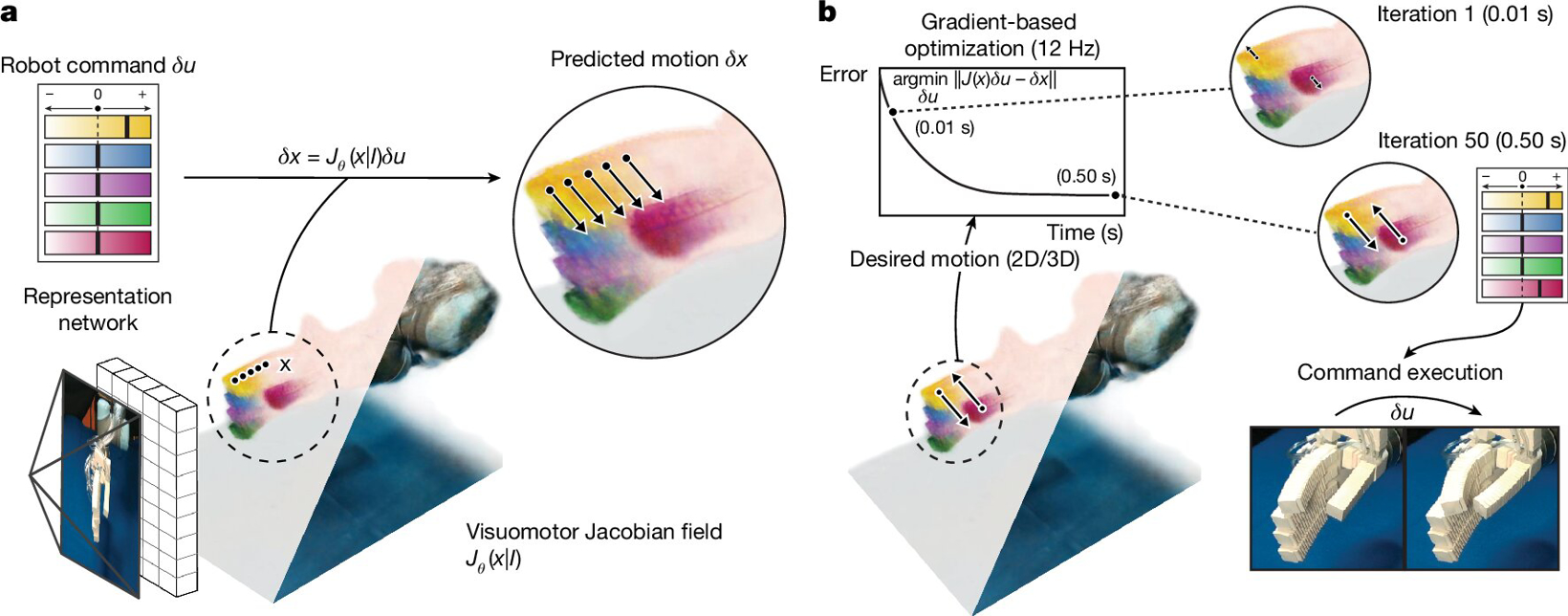
据外媒报道,麻省理工学院(MIT)的研究人员采用一种全新且资源需求更低的方法,开发了一种复杂程度更低的深度学习控制系统,该系统只需一张图像就能教会柔软的仿生机器人移动并执行指令。相关研究成果发表在期刊《Nature》上。
- 随机文章
- 热门文章
- 热评文章
- 本田将投资日本芯片制造商Rapidus
- 斯巴鲁押注美国产全新森林人,抵御关税冲击
- 【盖世快讯】一汽奥迪高管谈消费级芯片上车;传问界M8纯电版本月或开启小定
- 一家老牌大型传统车企,如何轻盈转身?
- 叫停电动车研发,本田在打什么算盘?
- 阿贡研究人员开发出从水中提取锂的新型膜技术
- 滑板底盘集成方案benchmark | 盖世大学堂智能底盘技术开发系列知识讲解
- 特朗普称美国将于8月1日起对欧盟和墨西哥征收30%的关税










